This animation demonstrates Movement No. 75 from “507 Mechanical Movements” — a mechanism that converts reciprocating rectilinear motion into intermittent circular motion using a pawl and ratchet wheel. The driving rod C moves back and forth in a straight line. This reciprocating motion causes the vibrating bar D, which is connected to the rod, to swing alternately in two directions. At the end of the vibrating bar D sits the pawl B — a small pivoting catch shaped to engage the teeth of the ratchet wheel A. On the forward stroke of rod C, the vibrating bar D swings in one direction, and the pawl B catches a tooth of ratchet wheel A, pushing it forward by one or more teeth and advancing the wheel through a precise angular increment. On the return stroke, the bar D swings back, but the pawl B simply slides over the tops of the ratchet teeth without engaging them, allowing the wheel A to remain stationary. A separate stop-pawl or detent may also be used to prevent the wheel from back-driving during the return stroke. This cycle of advance and dwell repeats with every full stroke of the reciprocating rod C, producing a smooth and reliable intermittent rotation. The angular increment per stroke can be adjusted by changing the geometry of the pawl, the tooth pitch of the ratchet wheel, or the stroke length of the driving rod. The pawl-and-ratchet mechanism is one of the most fundamental and widely used mechanisms in mechanical engineering. It has been applied in clocks, textile looms, printing presses, feed mechanisms for machine tools, and countless other devices requiring controlled one-directional intermittent motion.
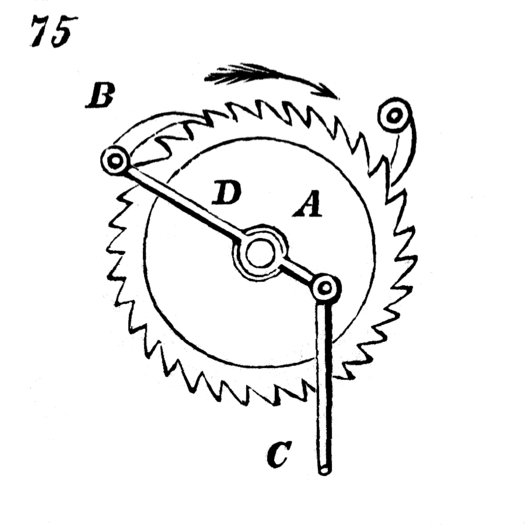
75. Reciprocating rectilinear motion of the rod, C, transmits an intermittent circular motion to the wheel, A, by means of the pawl, B, at the end of the vibrating-bar, D.