Movement No. 66 presents a direct and elegant modification of Movement No. 64 — replacing the spring and cam mechanism of that system with a simpler, gravity-based alternative: a weighted arm. In Movement No. 64, a specially shaped cam and a spring worked together to create the snap-action jumping motion — the spring stored energy as the worm-gear’s pin slowly pushed the cam, then released it suddenly when the cam profile caused the spring’s pressure direction to reverse. In No. 66, this complexity is stripped away entirely. Instead, a weight D is fixed to an arm that is secured to the shaft of the worm-gear. As the worm-gear slowly rotates, the arm and weight rotate with it — gravity acting on the weight creates a torque that, depending on the arm’s angular position, either resists or assists the worm-gear’s rotation. The worm-gear’s pin acts against the arm: when the pin pushes the arm upward past the top dead center position (where gravity transitions from resisting to assisting), the weight and arm drop suddenly under gravity — snapping forward independently of the worm-gear until the pin catches up. This produces the same characteristic jumping snap-action output as No. 64, but driven entirely by the potential energy of gravity stored in the raised weight rather than a compressed spring. The weighted arm solution is simpler and more robust — fewer precision components, no spring fatigue concerns — making it well suited for coarser or higher-duty applications where the spring-and-cam elegance of No. 64 is unnecessary. The modification elegantly demonstrates how the same functional result can be achieved through different energy-storage mechanisms: spring potential energy versus gravitational potential energy.
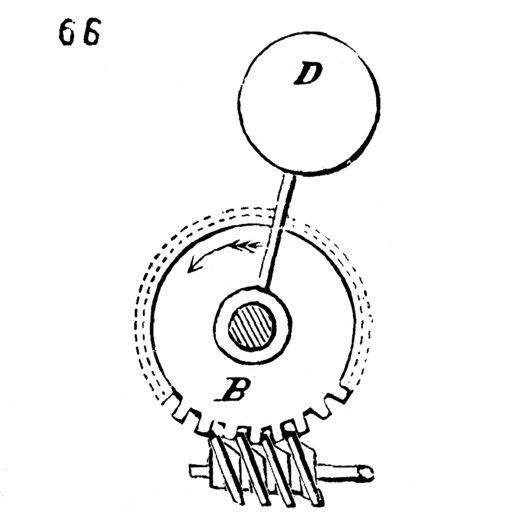
66. A modification of 64; a weight, D, attached to an arm secured in the shaft of the worm-gear, being used instead of spring and cam.