Movement No. 43 is the second of two mechanisms (Movements 42 and 43) presenting different gear solutions for transmitting rotary motion between two shafts arranged obliquely to one another — shafts that are neither parallel nor intersecting, but skewed relative to each other in three-dimensional space. While Movement No. 42 addressed this challenge using crossed helical gears, Movement No. 43 presents a bevel-type gear solution adapted for oblique shaft arrangements. Bevel gears in their standard form (Movement No. 25) are designed to transmit motion between intersecting shafts — typically at 90 degrees — where the axes of both shafts meet at a common point. The variant shown in No. 43 extends this concept to handle shafts that are oblique: the cone geometry of the gear pitch surfaces is adapted so that the gear pair can accommodate the angular relationship between the two non-intersecting, non-parallel shafts. This type of oblique bevel gear arrangement provides a more positive, higher-load tooth engagement compared to the point-contact nature of crossed helical gears, making it better suited for moderate-to-heavy load transmission between skew shafts. However, the geometric complexity of designing and manufacturing bevel gears for non-standard oblique shaft angles is considerably greater than for standard 90-degree bevel gears. Together, Movements 42 and 43 illustrate two fundamentally different engineering approaches to the same geometric challenge of skew-shaft power transmission — crossed helical gears offering geometric versatility at the cost of load capacity, and oblique bevel gears offering higher load capacity at the cost of geometric complexity.
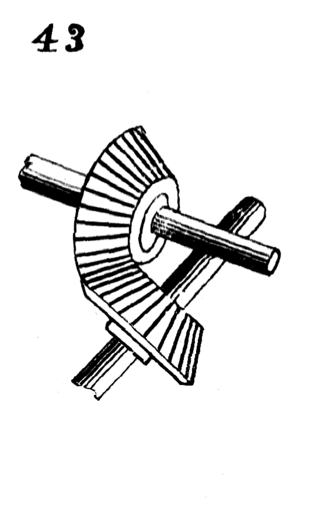
42 and 43. Different kinds of gears for transmitting rotary motion from one shaft to another arranged obliquely thereto.